产品详情技术指标产品上位机、驱动以及示例代码、硬件及结构设计参考文件文档资料
FSS-NAV680D 是米乐官网科技基于⻋规级IMU 平台和全系统全频点双天线 RTK,推出的⼀款多传感器组合导航产品。NAV680D 内置米乐官网米乐(中国)特有的阵列式IMU 传感器,⽀持外接⾥程计信息,进⽽在城市峡⾕,隧道⾼架等场景提供准确连续实时的姿态速度位置信息。提供RTK 原始观测量的记录结合时空同步的IMU 采样机制,⽅便⽤⼾进⾏⾼精度后处理。
产品特点(1)内置全系统全频点⾼精度RTK板卡,⽀持BDS B1/B2/B3 +GPS L1/L2/L5+GLONASS L1/L2+Galileo E1/E5b。
(2) 内置阵列式 IMU传感器,通过完善的组合导航算法和时空同步机制,提供实时准确的姿态,速度,位置信息。
(3) ⽀持SD卡存储⽇志数据。
(4) ⽀持记录 RTK 原始观测量和星历。
(5) ⽀持外接⾥程计。
RTK指标 | 定位精度(RMS) | 单点:1.5m | ||
定向精度(RMS) | 0.2°/1m基线 | |||
速度精度(RMS) | 0.05m/s | |||
更新率 | 20hz | |||
RTK初始化时间 | <5s | |||
IMU指标
| 陀螺量程 | ±250°/s | ||
陀螺零偏不稳定性 | 2.5deg/h | |||
加速度计量程 | ±6g | |||
加速度计零偏不稳定性 | 0.020mg | |||
更新率 | 100hz | |||
组合导航系统性能 | GNSS 中断时间 | 位置精度(2σ)
| 姿态精度(2σ) | 速度精度(2σ)
|
0s | 2cm | 0.1° | 0.02m/s | |
60s | 2.0‰ | 0.2° | 0.1m/s | |
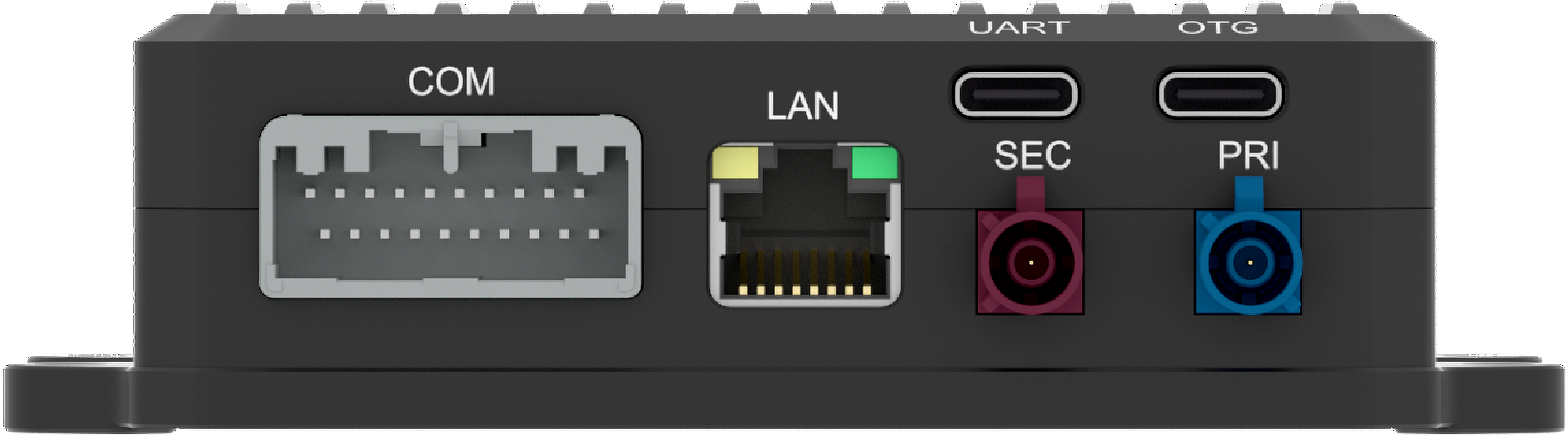
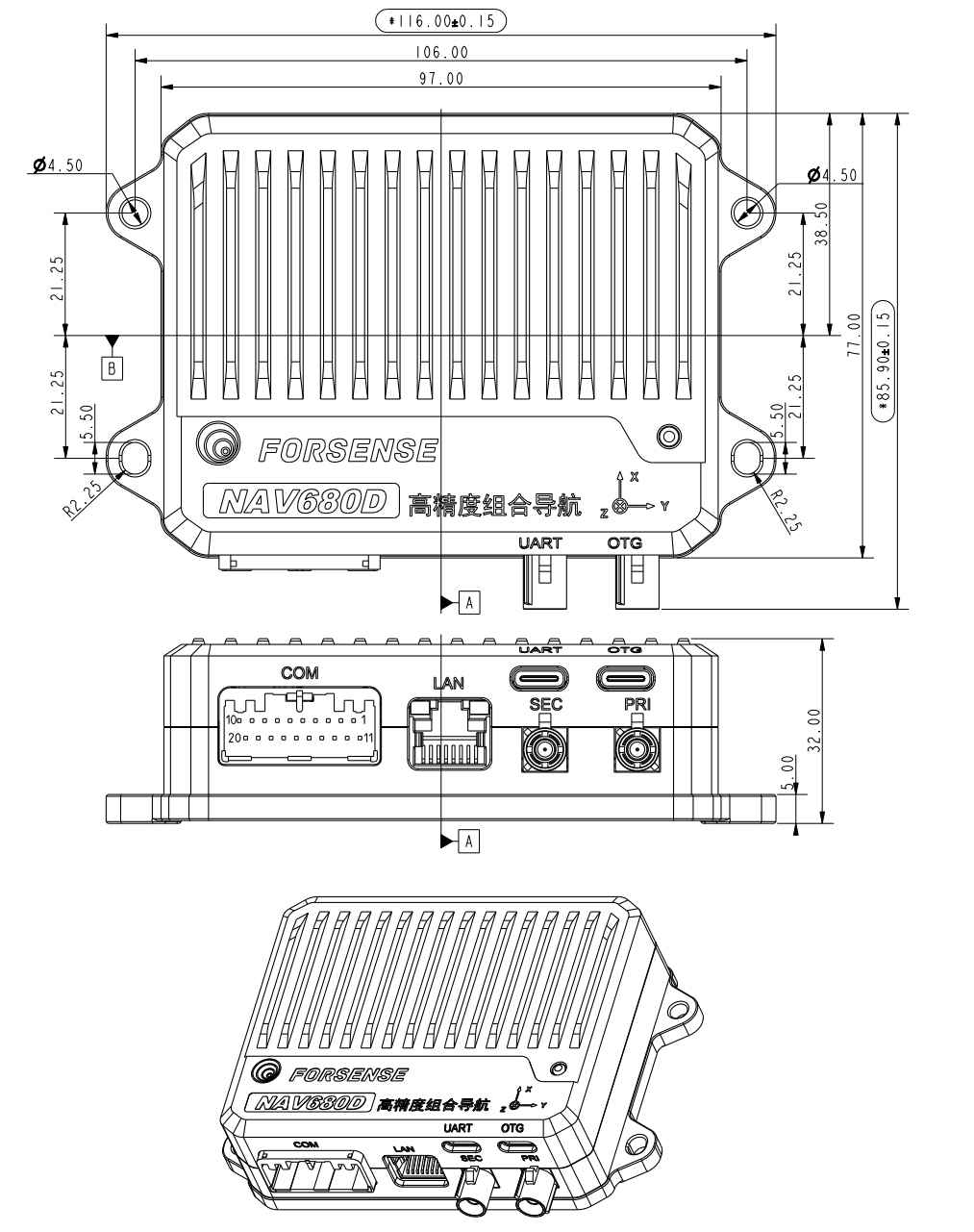
接口 | 3×RS232 1xCAN(A) 1×CAN FD(B) 1×网口 2×GNSS 天线接口 1×电源接口 1×PPS接口 | |||

;){kind=link}
;){kind=link}